发布日期:2025-03-26 13:03 点击次数:77
hongkongdolldeepin 23 +树莓派还有啥新玩法?hongkongdoll
天水在线
绪言
继咱们之前发布的树莓派运转 deepin 23 系统教程后,这次咱们将深刻探索怎样借助树莓派已矣与硬件的交互,进而精确扫尾小车的运转。
硬件准备
以下是所需的硬件清单,望望我方都备都了吗?
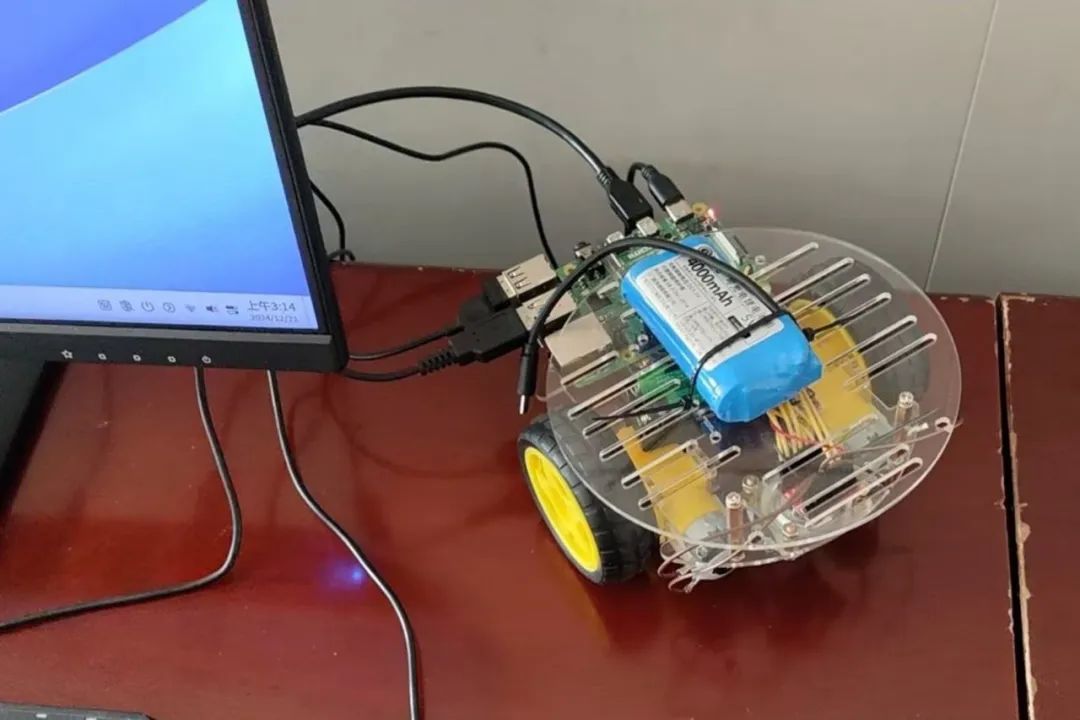
树莓派 4b
智能小车底盘 双层圆盘(两轮附带电机、电板盒)
Type-C接口 5V 锂电板(给树莓派供电)
TB6612FNG 电机驱动模块
装配环境
系统:deepin 23
成就 Python 环境
sudo apt install python3-pip python3-venv python-dev-is-python3 python3 -m venv venv source venv/bin/activate pip3 install bottle rpi.gpio
装配 gpio 作事
sudo apt install pigpiod sudo systemctl enable pigpiod sudo systemctl start pigpiod
硬件装配
参考图如下:
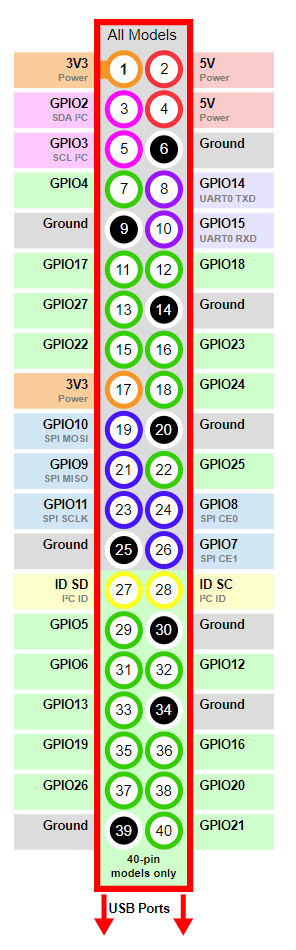
TB6612 树莓派 电机 讲明 PWMA 18 A 电机扫尾信号输入 AIN2 27 A 电机输入端 2 AIN1 17 A 电机输入端 1 STBY +3.3V 驱动器的总开关,STBY 高电泛泛责任,低电泛泛住手。 BIN1 22 B 电机输入端 1 BIN2 23 B 电机输入端 2 PWMB 19 B 电机扫尾信号输入 GND Power 接入外部电源负极 VM Power(电机驱动电压输入端,从外部电源正极输入) VCC +5V Power(逻辑电平输入端,从树莓派接入5V) GND GND Power 接入树莓派 GND AO1 A 电机输出端 1 电极朝外,左轮下方电极。 AO2 A 电机输出端 2 电极朝外,左轮上方电极。 BO2 B 电机输出端 2 电极朝外,右轮上方电极。 BO1 B 电机输出端 1 电极朝外,右轮下方电极。
这里使用 Type-C 接口可充电的 5V 锂电板给树莓派供电,电机驱动模块使用电板盒放入 2 节 5 号电板供电。
运转短处
克隆源码
git clone git@github.com:chenchongbiao/Raspberry-Car.git
调用 gpio 需用 root 权限。这里成功切 root 用户运转短处。
sudo su source venv/bin/activate python3 Start.py
运转告捷后,通过浏览器输入 :8088
这里的 ip 为树莓派的ip 地址。不错通过点击网页上的按钮操控树莓派小车。
参考良友
原作家样子:https://github.com/valieo/Raspberry-Car